| Accueil | Enseignement Secondaire | Enseignement de Base | Inscription | Contact |
|
Série 1 : Schéma cinématique
Considérant le schéma d’ensemble représenté ci-dessous : 1) Colorier les classes d’équivalence sur le plan d’ensemble. 2) Recenser les pièces composant chaque groupe (les pièces élastiques à exclure). 3) Etablir le graphe des liaisons. 4) Identifier les liaisons entre les groupes. 5) Construire le schéma cinématique minimal.
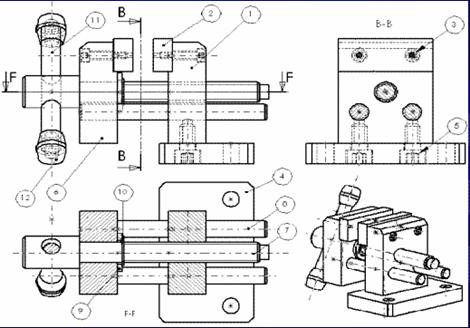
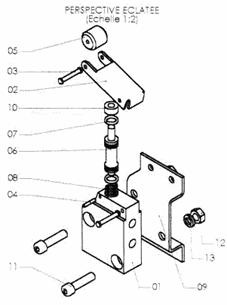
Mise en situation : § Présentation : le capteur pneumatique représenté sur le dessin d’ensemble est un composant pneumatique utilisé comme détecteur de fin de course d’un vérin simple effet (voir double effet). Ce matériel peut être installé sur différentes machines asservies pneumatiquement. C’est un élément de commande d’un circuit pneumatique. § Fonctionnement : Lorsque la tige de vérin est en fin de course (tige totalement sortie), son extrémité appuie sur le galet (05), bascule le levier (02) qui déplace le tiroir (06) vers le bas. Lorsque le tiroir est déplacé verticalement vers le bas (de y+ vers y-), l’air comprimé admis dans le capteur pneumatique passe de l’orifice d’entrée à l’orifice de sortie, commandant la coupure de l’alimentation du vérin et provoquant ainsi la rentrée de la tige de vérin. Le capteur reprend alors sa position initiale (le tiroir (06) remonte).
1) Identifier les classes
d’équivalence : a) Indiquer les pièces à exclure de toutes classes
d’équivalence en précisant la quantité de
chaque pièce si celle-ci est différente de 1 b) Déterminer la classe d’équivalence E1 liée à la
pièce 01 c) Déterminer la classe d’équivalence E2 liée à la
pièce 02 d) Déterminer la classe d’équivalence E3 e) Déterminer la classe d’équivalence E4 2) Identifier les liaisons entre les
classes d’équivalence :
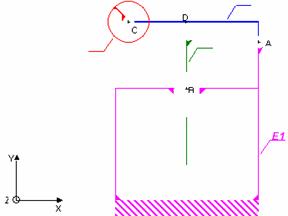
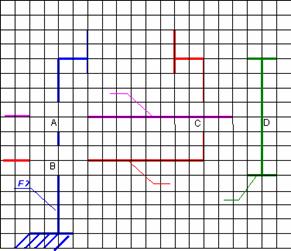
3) Déterminer le graphe des liaisons 4) Compléter Le schéma cinématique
minimal suivant la vue de face en coupe A-A : hypothèse : Le levier (02) est en position
horizontale. La normale (perpendiculaire) en D au plan de contact entre le
tiroir (06) et le levier (02) est verticale de direction Dy. §
Représenter
les liaisons centrées sur leur centre de liaison respectif (A,B,C,D). §
Compléter
le schéma cinématique avec le nom et la couleur de chaque classe d’équivalence
en utilisant la représentation normalisée des liaisons.
Mise en situation : §
Présentation :
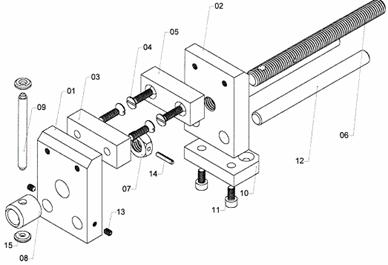
L’étau de modéliste représenté est un outil employé par les modélistes pour
maintenir en position une ou plusieurs pièces entre elles (MAP des pièces) afin
de réaliser des opérations diverses telles que : Collage, Perçage, … §
Fonctionnement
: La semelle de l’étau (10) est fixée à un établi. L’utilisateur en tournant la
poignée (09) autour de l’axe X fait translater le mors mobile (01) par rapport
à la semelle (10) suivant l’axe X et provoque l’écartement ou le rapprochement
du mors mobile (01) par rapport au mors fixe (02).
1) Identifier les classes d’équivalence : a) Déterminer la classe d’équivalence E1 liée à la
pièce 01 b) Déterminer la classe d’équivalence E2 liée à la
pièce 02 c) Déterminer la classe d’équivalence E3 liée à la
pièce 06 d) Déterminer la classe d’équivalence E4 liée à la
pièce 09 2) Identifier les liaisons entre les
classes d’équivalence :
3) Déterminer le graphe des liaisons 4) Compléter Le schéma cinématique
minimal suivant la vue de face en coupe A-A : §
Représenter
les liaisons centrées sur leur centre de liaison respectif (A,B,C,D). §
Compléter le schéma cinématique avec le nom et la
couleur de chaque classe d’équivalence en utilisant la représentation normalisée des liaisons.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||